-
Ordering information
Call us or mail us for inquiries & availability: info@mtronixtech.com
-
Search projects by Price
-
Project Categories
- Robots and Robotics
- GSM based Projects
- GPS based Projects
- RFID based Projects
- Energy Saving
- Wireless Communication
- DTMF based proejcts
- SMS based projects
- RF Remote
- Mobile Controlled
- Power Saver
- Sensor based Projects
- Alcohol Sensor
- Heartbit Sensor
- Humidity Sensor
- Infrared Sensor
- Level Sensor
- Light Sensor
- LPG Gas Sensor
- Moisture Sensor
- Temperature Sensor
- Vibration Sensor
- Weight Sensor
-
Search projects by Application
Search by Components
89c51 89s51 89s52 89v51RD2 555 ADC0808 ADC0809 AT24c16 AT24c64 AT89s52 Battery BC547 Bulb Buzzer Darlington Pair DC motor Decoder EEPROM Fan GPS GSM IR LED Keypad L239D LCD Display LDR LED LM35 LM358 Matrix keypad MAX232 Motor Driver MQ6 PC Interface Relay RFID Card RFID Reader RFID Tags Sim300 sim900 SR86 SR87 Stepper Motor SYHS220 TSOP1738
Home
Projects of 8051 Project Details
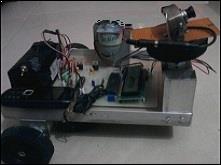
Pick and Place robot

|
Project Cost :
 10,000/-
10,000/-
Courier charges: Rs.1,000/- Available in: 3 Days Project Code: 1220 
 |
Project Photographs:




 You will get a CD with this project:
You will get a CD with this project:
CD contains following things:
1) Project Report
2) Circuit diagram
3) PCB layout
4) Microcontroller program in assembley language
5) Hex file of the microcontroller code
6) Datasheets of all the components / ICs used in the project
Operating Modes:
This project is available in 2 operating modes
1) Keypad controlled (wired control)
2) Mobile controlled (wireless control through mobile calling)
INTRODUCTION:
In this highly developing society; time and man power are critical constrains for completion of task in large scales.
The automation is playing important role to save human efforts in most of the regular and frequently carried works
e.g. most of the industrial jobs like welding, painting, assembly, container filling etc.
one of the major and most commonly performed work is picking and placing of jobs from source to destination.
For this purpose, pick and place robot maybe used.
The pick and place robot is a microcontroller based mechatronic system that detects the object,
picks that object from source location and places at desired location. For detection of object,
infrared sensors are used which detect presence of object as the transmitter to receiver path
for infrared sensor is interrupted by placed object. As soon as robot senses presence of object,
it moves towards object, picks it with end effectors, and moves along way gantry and finally place it on destination.
If another object causes interrupt, it again does the same job. Whole process is controlled by micro controller.

MECHANICAL DESIGN:
This pick and place robot has two main mechanical components:
A] Robotic arm and end-effectors.
B] Gantry for moving the arm.
OPERATION OF ROBOT:
1. Initially we will assume the rest position of entire system, i.e. state when no object is placed.
2. At this stage, photo detector is having its output high, since receiver of sensor can receive photons from transmitter as no object I in its path to interrupt.
3. As soon as object is placed at the picking platform, the sensor gets interrupted and outputs low. This signal is sent to the microcontroller which is burnt with program which tells what operation is to be performed at this stage.
4. For understanding operation, let us rename the two motors used here. Let the name of gantry motor be M1 and that for end effecter motor is M2.
5. Now as microcontroller detects that object is placed, it moves motor M1 in say clockwise direction for a fixed time due to which whole arm moves towards picking platform.
6. As it reaches there, M1 stops and now motor M2 is started in say clockwise direction to hold the object by closing jaw. This motor also, is on for particular fixed time instant.
7. As M2 gets off, motor M1 is moved again in opposite (here anticlockwise) direction till the time it reaches the placing platform.
8. As it reaches placing platform, the motor M1 stops and M2 is switched ON in opposite (here anticlockwise) direction till it releases object properly on desired place.
9. If after this no object is detected, the robot is in rest position. Otherwise if another object is detected, steps from 3 are repeated till step 8.
BLOCK DIAGRAM DESCRIPTION:
I] Microcontroller:
1. PORT 0: (PIN NO. 39- PIN NO. 32): P0.0 P0.7 of the micro controller is
connected to the motor driver circuit.
2. Pin no. 9 is RESET pin, which is connected to the reset circuit.
3. Pin no. 9 and 10 of ADC are serial data line (SDA) and serial clock line (SCL)
respectively. Both are connected to a positive supply through a pull-up resistor. These pins are connected to the P1.6 & P1.7 of the micro controller.
II] DRIVER CIRCUIT:
1. The L293 and L293D are quadruple high-current drivers.TheL293is designed to provide bidirectional drive currents of up to 1 A at voltages from 4.5 V to 36 V. The L293D is designed to provide bidirectional drive currents of up to 600-mA at voltages from 4.5 V to 36 V. Both devices are designed to drive inductive loads such as relays, solenoids, dc and bipolar stepping motors, as well as other high-current/high-voltage loads in positive-supply applications.
2. All inputs are TTL compatible. Each output is a complete totem-pole drive circuit, with a Darlington transistor sink and a pseudo-Darlington source. Drivers are enabled in pairs, with drivers 1 and 2 enabled by 1,2EN and drivers 3 and 4 enabled by 3,4EN.
3. When an enable input is high, the associated drivers are enabled and their outputs are active and in phase with their inputs. When the enable input is low, those drivers are disabled and their outputs are off and in the high-impedance state. With the proper data inputs, each pair of drivers forms a full-H (or bridge) reversible drive suitable for solenoid or motor applications.
4. A Vcc1 terminal, separate from Vcc2, is provided for the logic inputs to minimize device power dissipation.
APPLICATIONS:
1. It can be used in Production industry.
2. In mass production.
3. In Automobile Industry.
FUTURE SCOPE:
1. Bottle filling Plant.
2. Construction works.
Video of the project: Mobile controlled Pick and place Robot
Question and answers about Pick and Place Robot project:
Do you have question or any feedback about this project?
Please email your questions to: info @ mtronixtech.com
| Similar or Related Projects: |
||
 Cell phone operated Landrover Robot |
 Remote Surveillance Vehicle |
Pick and Place robot |